Nach nun einiger Zeit, möchte ich erneut über den Fortgang des bereits unter http://www.freeduino.de/blogs/matthiasg/roboter-i vorgestellten Roboters informieren.
Der Zwischenstand des letzten Males
Zunächst mussten beide - noch unzureichend befestigte - Seitenwände miteinander verbunden werden. Das alte Konstrukt wurde dazu aufgelöst, Schienen aus Alu-Vierkant-Profil gesägt und Löcher hinein gebohrt.
 Eine einzelne Schiene, die die Roboterteile später zusammenhält
Eine einzelne Schiene, die die Roboterteile später zusammenhält
 Das Zusammenschrauben des Roboters - deutlich erkennbar das in den Fliesen festgetretene Aluminium...
Das Zusammenschrauben des Roboters - deutlich erkennbar das in den Fliesen festgetretene Aluminium...
Das verschraubte Endkonstrukt ist nicht nur unheimlich stabil, sondern auch vergleichbar leicht. Obwohl die Länge ca. 60 cm beträgt, liegt das (geschätzte) Gewicht (ohne Motoren und Akku) bei ungefähr 4 Kilogramm.
 Alle Aluschienen sitzen, der Roboter hält
Alle Aluschienen sitzen, der Roboter hält
Da nun das Grundgerüst stand, war es Zeit, einen vernünftigen Motorblock einzusetzen. Der ursprünglich vorgestellte hatte sich als zu schwer, unhandlich und platzfressend heraus gestellt. Deshalb musste dieser ersetzt werden - das Grundmaterial gleich den Wänden.
 Der Motorblock wird eingesetzt - rechts ist eine Scheibe zu erkennen
Der Motorblock wird eingesetzt - rechts ist eine Scheibe zu erkennen
Aufgrund der neuen Platzsituation mussten zwei Lüfter (die ohnehin überflüssig waren) weichen, und auch die Kugellager entfernt werden (sie saßen minimal schief im Gehäuse).
 Die neue Haltevorrichtung besteht aus Buchenholz, das mit Hilfe eines 22mm-Bohrers auf passende Größe gebracht wurde. Eine Aluschiene mit verkleinerter Bohrung verhindert ein Rutschen.
Die neue Haltevorrichtung besteht aus Buchenholz, das mit Hilfe eines 22mm-Bohrers auf passende Größe gebracht wurde. Eine Aluschiene mit verkleinerter Bohrung verhindert ein Rutschen.
Der gesamte Motorblock kann sich mehr als sehen lassen und gleicht fast (aber nur fast) Präzisionsarbeit.
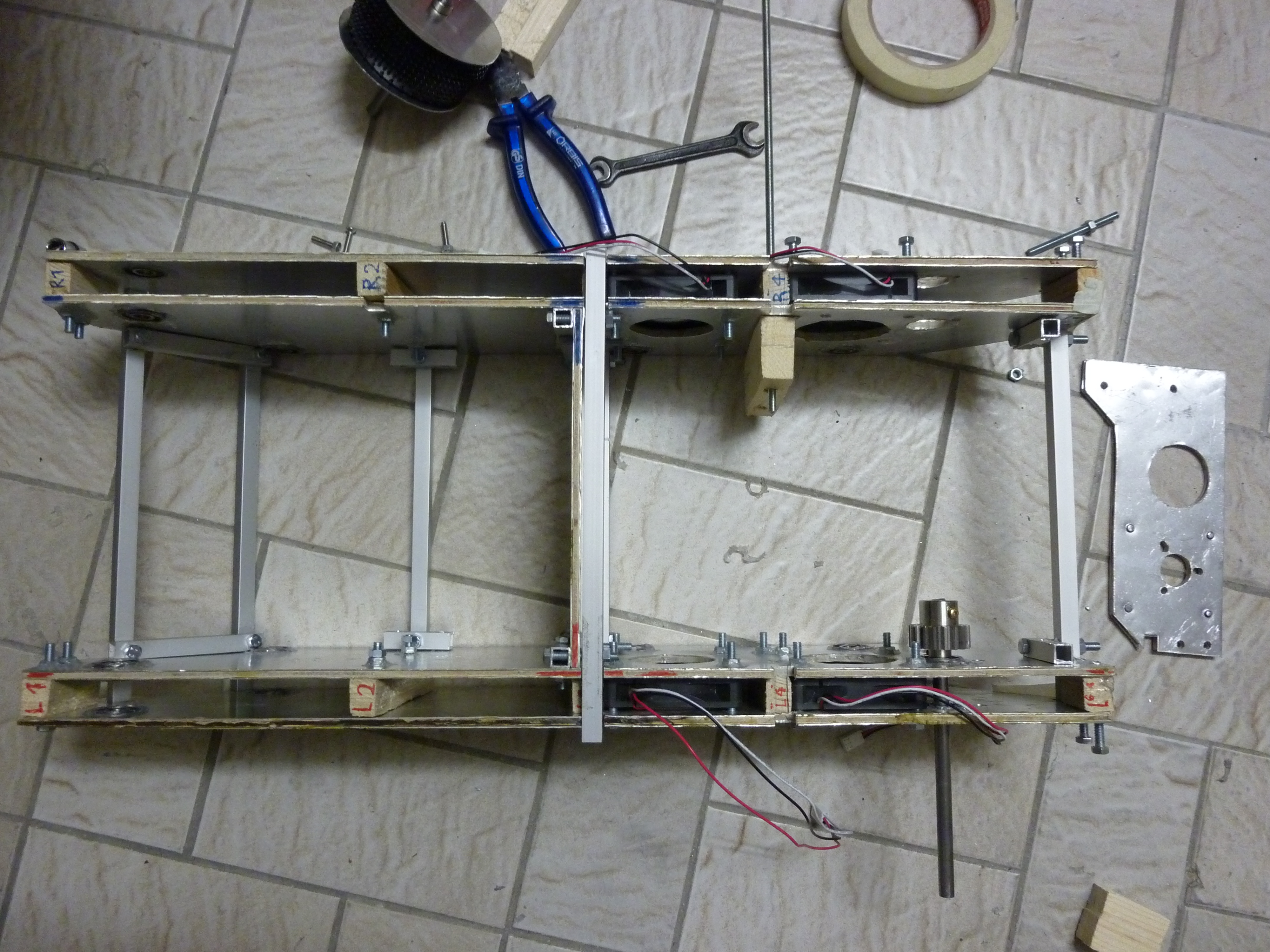
 Der neue Motorblock von oben - gut erkennbar ist, dass der andere Motor passgenau hinein ragt
Der neue Motorblock von oben - gut erkennbar ist, dass der andere Motor passgenau hinein ragt
 Von unten...
Von unten...
Unterhalb des Motorblockes ist Platz erkennbar (s. folgendes Bild), darauf befestigen wir in Zukunft eine dünne Holzplatte, auf die praktisch Kopfüber die Elektronik zum Steuern der Motoren verschraubt wird.
 Gut erkennbar ist die spätere Position der Elektronik-Halterung.
Gut erkennbar ist die spätere Position der Elektronik-Halterung.
Auch die Ketten konnten wir erfolgreich aufspannen, sodass der Roboter komplett fahrbereit war - die Verbindung der Motoren mit dem Akku bestätigten dies.
 Die Ketten in Position
Die Ketten in Position
 Die Motoren werden provisorisch verkabelt
Die Motoren werden provisorisch verkabelt
Die Kette ist tatsächlich in der Lage das bisherige Gewicht (mit Akku und Motren ca. 8 - 9 Kilogramm) zu tragen - der Roboter fährt in Schrittgeschwindigkeit. Vorne fehlt noch ein erhöhtes Führungsrad, das wir aus Zeitgründen nicht einbauen konnten. Dieses sorgt später dafür, dass auch Hindernisse überwunden werden können.
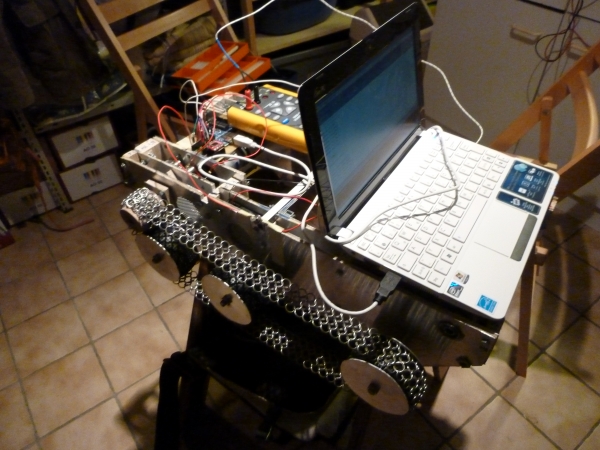
Nach einem Standortwechsel konnten wir die Elektronik nun einbauen und testen: Tatsächlich - ein kleines Programm auf dem Arduino konnte ein Breakout von Sparkfun (http://www.watterott.com/de/Motor-Driver-1A-Dual-TB6612FNG) ansteuern, über den Pc war es möglich, den Roboter zu steuern.
Der nächste Schritt war die Unabhängigkeit vom Netzteil, dazu haben wir einen Akku mit in den Roboter gestellt (12 V / 7,2 Ah, Blei-Gel), aufgrund von Kurzschlüssen, die wir versehentlich verursacht haben, sicherheitshalber einen Temperaturfühler angelegt, den Laptop geschultert und alles angeschlossen: Ein großer Fehler.
 Ein Kamikaze-Versuch, wie sich heraus stellen sollte. Zu sehen ist im hinteren Bereich, auf den Motoren aufliegend, der Arduino.
Ein Kamikaze-Versuch, wie sich heraus stellen sollte. Zu sehen ist im hinteren Bereich, auf den Motoren aufliegend, der Arduino.
Sobald der Kontakt zwischen Akku und Motor-Driver geschlossen wurde, gab es eine laute Explosion und eine hohe Stichflamme: Der Kondensator auf dem Board war uns abgeraucht.
 Der abgerauchte Kondensator ist rechts gut zu erkennen.
Der abgerauchte Kondensator ist rechts gut zu erkennen.
Damit dieser Fehler nicht noch einmal passiert: Was genau haben wir falsch gemacht? Am Netzteil hatte es funktioniert, deshalb haben wir wohl zu leichtfertig die Gerätschaft zusammen gesteckt. Vermutlich fehlte ein Widerstand? Auch den Einbau einer Feinsicherung werden wir demnächst wohl in Angriffnehmen. Jedoch: Welchen Wert sollte diese haben?
Wir wissen nun, dass der Roboter bis jetzt funktioniert. Der nächste Schritt wäre das Verbauen von Abstandssensorik, um den Roboter autonom fahrbar zu machen. Jedoch werden wir dafür wohl noch etwas Zeit brauchen...
Viele Grüße aus dem Pott und "Stay tuned",
Matthias



{kind=link}
vor 1 year 22 weeks
@Matthias
Gefällt mir bis jetzt sehr gut, ich habe nur ein bisschen Konstruktive Kritik.
Ich bin der Meinung, dass ihr spätestens wenn ihr mit dem Teil nach draußen fahrt (das habt ihr doch vor oder?) Probleme mit dieser "Kette" bekommt, da verhakt sich bestimmt schnell ein Stock oder ähnliches drin und blockiert den ganzen Roboter.
Da ich mich gerade mit dem Thema Beleuchtung beschäftige überrascht mein weiterer Vorschlag nicht sonderlich, das Teil braucht meiner Meinung nach eine Vernünftige Beleuchtung.
Login or register to post comments